|
|
REGULACJA OBROTÓW, MOCY I ZABEZPIECZENIE WIATRAKA PRZED SILNYMI WIATRAMI
Ze względu na zmienną prędkość
wiatru oraz konieczność napędzenia różnych urządzeń (prądnice, pompy
itp.) przeważnie w miarę z jednakową prędkością obrotową, wiatrak
należy
zaopatrzyć w odpowiednią regulację. Poza tym niekiedy wymagana jest
stała
moc, a zawsze jej ograniczenie przy zbyt silnych wiatrach. Ponadto
mechanizm
regulacji powinien zabezpieczać silnik wiatrowy przed rozbieganiem się
w
przypadku jego odciążenia. Bez tych dodatkowych urządzeń silnik
wiatrowy może
ulec zniszczeniu przy większym wzroście prędkości wiatru nawet przy
jego znamionowym obciążeniu.
Ponieważ różne urządzenia regulacyjne niejednakowo odpowiadają
poszczególnym
wymaganiom pracy silników wiatrowych, często stosuje się w jednym
silniku
kilka z nich, np. jedno reguluje prędkość obrotową, inne ogranicza
maksymalną
moc, jeszcze inne zabezpiecza przed huraganem.
REGULACJA PRZEZ ZMIANĘ POŁOŻENIA KOŁA WIATROWEGO WZGLĘDEM KIERUNKU WIATRU
W tej regulacji podczas zbyt silnego wiatru kołu wiatrowemu nadaje się skośne położenie względem kierunku wiatru, przez co przez koło przepływa mniejsza ilość powietrza; poza tym wskutek występujących wtedy zmian kątów natarcia poszczególnych łopatek opory aerodynamiczne rosną, co powoduje odpowiednie zmniejszenie obrotów wiatraka.
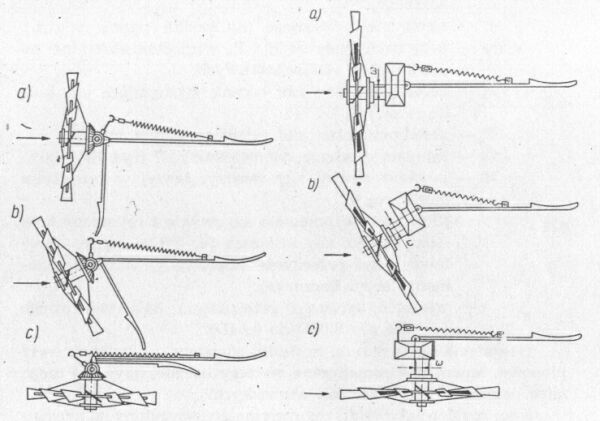
Rys. 1. Wiatrak odchylany za pomocą steru
bocznego (rys. po lewej) i wiatrak odchylany dzięki zamocowaniu
mimośrodowemu
(rys. po prawej).
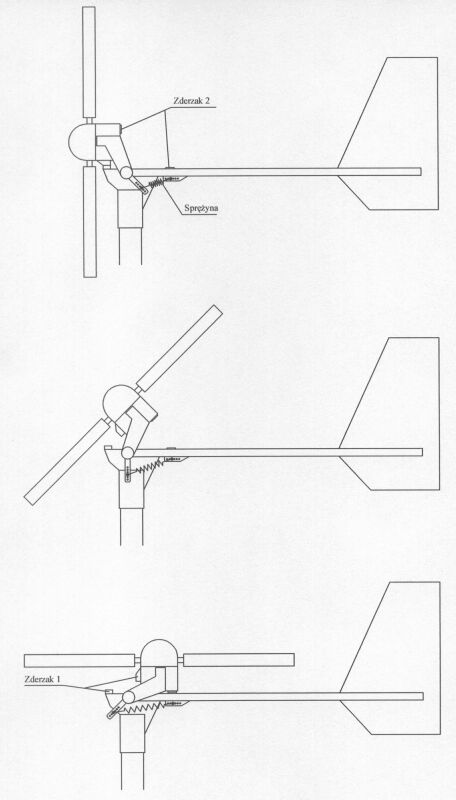
Rys. 2. Schematy mechanizmów regulacji a) ze
sprężyną
rozciąganą, b) ze sprężyną ściskaną, c) z krzywką regulującą długość
ramienia, na które działa sprężyna.
1) część do której zamocowany jest wirnik (głowica); 2) ramię steru
tylnego; 3) sprężyna rozciągana; 4) otwory regulacyjne naciągu
sprężyny;
5) sprężyna ściskana; 6) krzywka
Regulacja ta jest jedną z prostszych i często bywa stosowana, szczególnie w silnikach wielołopatkowych małej i średniej mocy. Przy prędkości obliczeniowej koło daje moc znamionową jeszcze w położeniu prostopadłym do kierunku wiatru, a w miarę wzrostu jego prędkości zaczyna się odchylać. Ster tylny zazwyczaj jest osadzony przegubowo w głowicy silnika i utrzymywany we właściwym miejscu naciągiem odpowiednio założonej sprężyny. Regulacja ta realizowana jest poprzez:
1. Umieszczenie tuż za kołem wiatrowym steru bocznego zamontowanego zazwyczaj z prawej lub lewej strony i sztywno połączonego z głowicą silnika. Powierzchnia steru bocznego wynosi zwykle 0,02-0,04 powierzchni koła wiatrowego. Moment regulacyjny uzyskuje się od parcia wiatru na ster boczny. Powoduje to przezwyciężenie naciągu sprężyny i przekręcenie koła łopatkowego skośnie do kierunku wiatru.
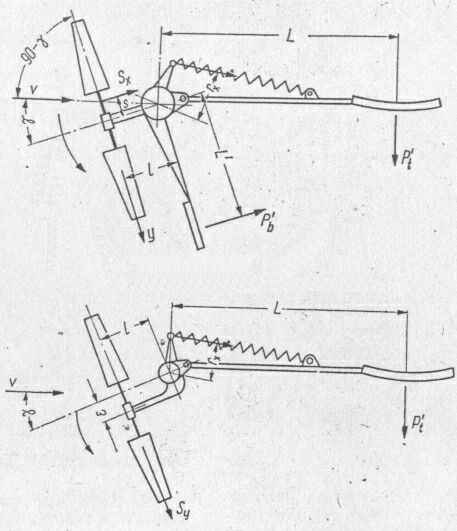
Rys. 3. Uwidocznienie sił i ramion na które
działają w regulacjach z odchylaniem koła wiatrowego.
2. Przesunięcie osi koła wiatrowego względem pionowej osi obrotu głowicy silnika (zamocowanie mimośrodowe) - zazwyczaj wynosi ono 0,02-0,04 średnicy silnika wiatrowego (e - na rys. 1 i 3). Moment regulacyjny uzyskuje się od parcia wiatru na samo koło wiatrowe (siła osiowa), przy czym ramię momentu jest tu równe wielkości przesunięcia osi koła względem osi obrotu głowicy. Powoduje to przezwyciężenie naciągu sprężyny i przekręcenie koła łopatkowego skośnie do kierunku wiatru.
3. Elektroniczne sterowanie siłownikiem (np. elektrycznym) umieszczonego w miejscu montowania sprężyny ww. rozwiązaniach. Siłownik przez zmianę swej długości steruje odchyleniem koła wiatrowego. Pracą sterownika steruje odpowiedni układ elektroniczny na podstawie mierzonej prędkości obrotowej silnika wiatrowego i (lub) prędkości wiatru.
Zmiany położenia kół łopatkowych mogą odbywać się zarówno w płaszczyźnie pionowej, jak i pionowej (rys. 4 i 5).
Rys. 4. Odchylanie wiatraka w płaszczyźnie
pionowej
Rys. 5. Odchylanie wiatraka w płaszczyźnie
pionowej (schemat)
W
silnikach szybkobieżnych (śmigłowych) raczej nie powinno się stosować
odchylania w
płaszczyźnie poziomej, ponieważ przy takim rozwiązaniu głowica silnika
wiatrowego znajduje się w ciągłym ruchu względem pionowej osi
powodowanym
nie tylko zmianami kierunku wiatru, ale i zmianami jego szybkości.
Występujące
w tych warunkach momenty żyroskopowe są zależne od iloczynu prędkości
kątowych
koła wiatrowego względem jego osi obrotu i względem osi obrotu
głowicy.
W
silnikach wolnobieżnych koło łopatkowe ma znacznie mniejszą prędkość
obrotową
niż śmigła w silnikach szybkobieżnych.
Z powyższych powodów w silnikach szybkobieżnych lepiej zastosować
odchylanie
wirnika w płaszczyźnie pionowej lub zastosować odpowiednio mocną
konstrukcję
łopatek, ewentualnie zastosować regulację elektroniczną, gdzie można
regulować szybkość odchylania wirnika.
Gdy z wiatraka moment obrotowy jest przekazywany za pomocą pionowego
wału w dół
wieży, należy zastosować sposób z odchylaniem koła wiatrowego w bok ze
sterem bocznym bądź regulacją elektroniczną.
W przypadku gdy koło łopatkowe odchylane jest w bok za pomocą steru
bocznego
lub przez przesunięcie osi koła ster tylny musi być ustawiony nieco pod
kątem
(patrz Nastawianie silnika pod
wiatr).
W wyniku regulacji silnika wiatrowego przez odchylenie wirnika od kierunku wiatru uzyskuje się następujące zależności:
- dla mocy Nn=N×cos3g
- dla prędkości obrotowej nn=n×cosg
gdzie Nn i nn jest mocą i prędkością obrotową koła łopatkowego przy obliczeniowej prędkości wiatru, g - kąt odchylenia osi wirnika od kierunku wiatru.
Z tych zależności wynika, że moc i prędkość obrotowa przy stałym obciążeniu w ukośnym położeniu wirnika względem wiatru są takie, jak gdyby były uzyskiwane tylko przez składową prędkość wiatru, prostopadłą do płaszczyzny koła wiatrowego. Z tego wynika, że jeśli chcemy uzyskać stałą moc i obroty przy większych szybkościach wiatru, należy zachować taki kąt odchylenia g , aby cosg był stosunkiem prędkości obliczeniowej do prędkości dolotowej (tzn. składowej prostopadłej) wiatru. Na poniższym rysunku przedstawiono zależność kąta odchylenia g od prędkości wiatru dla kilku prędkości obliczeniowych (8, 10, 12, 14 m/s).
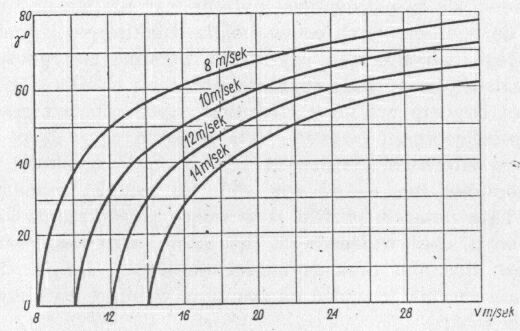
Rys. 6. zależność kąta
odchylenia g
od prędkości wiatru.
Dla osiągnięcia w silniku wiatrowym tych zmian wartości kąta odchylenia musi być dobrany odpowiednio naciąg sprężyny regulacyjnej, utrzymującej wirnik w określonym położeniu względem steru tylnego (kierunku wiatru). W praktyce jest to trudne do osiągnięcia, stosuje się np. zaczepienie jednego z końców sprężyny po odpowiednio ukształtowanej krzywce, aby zmienić ramię działania siły (rys. 2c). A nawet jeśli uda się to w miarę poprawnie zrobić, to i tak, jeśli obciążenie jest zmienne, będą występować większe wahania prędkości obrotowej. Mimo tych wad sterowanie to jest proste w budowie i trwałe oraz zabezpiecza wiatrak przed silnymi wiatrami. W warunkach amatorskich można ustalić mniej więcej doświadczalnie odpowiednie zaczepienie sprężyny, przy czym należy zacząć od najsłabszego jej naciągu. Należy też mieć możliwość ręcznego wyłączenia wiatraka poprzez zaciągnięcie odpowiedniej dźwigni. Często w różnych rozwiązaniach przy maksymalnym odchyleniu (wyłączeniu) wiatraka załączany jest automatycznie hamulec unieruchamiające wirnik.
Istnieje wiele odmian tego sterowania, w niektórych z nich stosuje się m.in. umieszczenie wirnika za masztem, wieżą, jednak w takim rozwiązaniu występuje kilka niekorzystnych zjawisk i przy budowie tego typu wiatraków trzeba mieć je na uwadze: duża szybkość kątowa obrotu wieżyczki - czyli większe momenty żyroskopowe; częściowe zasłanianie koła wiatrowego przez wieżę - skłonność do drgań, mniejsza równomierność momentu obrotowego; w przypadku większego przesunięcia koła wiatrowego na jedną stronę i braku przeciwciężaru w postaci steru tylnego - trudność w opanowaniu znacznych sił w oporowych łożyskach wieżyczki.
Oto kilka rozwiązań wyżej omówionego sterowania stosowanych w produkowanych wiatrakach.

W niektórych wiatrakach firmy Bornay
zastosowano odchylanie wirnika w płaszczyźnie pionowej (mimośrodowe
zamocowanie) wraz ze sterem tylnym. Sposób działania tej regulacji
przedstawia
powyższa animacja.

REGULACJA
HAMOWANIEM AERODYNAMICZNYM
Regulacja szybkości obrotowej
silników wiatrowych przy pomocy hamowania aerodynamicznego polega na
sztucznym zwiększaniu oporów aerodynamicznych śmigieł w miarę
zwiększania się ich szybkości obrotowej pod wpływem wzmagającego się
wiatru.
Zasadę tę urzeczywistnia się w wielu systemach regulacji kilkoma
sposobami, z których tutaj zostaną opisane następujące.
Na rys. 1 przedstawiono system regulacji podany przez niemieckiego
konstruktora
Bilana, polegający na tym, że w odpowiednim miejscu na płatach śmigła
są umieszczone łukowe klapy, mogące się przekręcać w płaszczyźnie
równoległej do płata śmigła, a utrzymywane w równowadze z siłą
odśrodkową przez naciąg odpowiednich sprężyn.
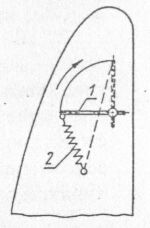
Rys. 1. Schemat regulacji systemem Bilana:
l -klapa regulacyjna, 2 - sprężyna naciągowa
Podczas umiarkowanego wiatru i
normalnej szybkości obrotowej śmigła klapy regulacyjne napotykają w
swym ruchu po obwodzie koła niewielkie opory aerodynamiczne. W miarę
jednak wzrastania szybkości wiatru i zwiększania się szybkości
obrotowej silnika naciąg sprężyn jest przezwyciężany przez siłę
odśrodkową klap, które odchylając się jednymi krawędziami nieco na
zewnątrz, zwracają się w kierunku obwodowym większą powierzchnią,
powodując odpowiednio zwiększony opór aerodynamiczny, a przez to
hamowanie śmigła.
Podobną regulację szybkości obrotowej zastosowano w amerykańskich
silnikach wiatrowych "Windcharger" (rys.
2 i 3) z tą tylko różnicą, że klapy regulacyjne są w nich umieszczone
nie w samych płatach śmigła, ale na oddzielnych ramionach, znajdujących
się w płaszczyźnie obrotowej śmigła, jednak do niego prostopadłych.
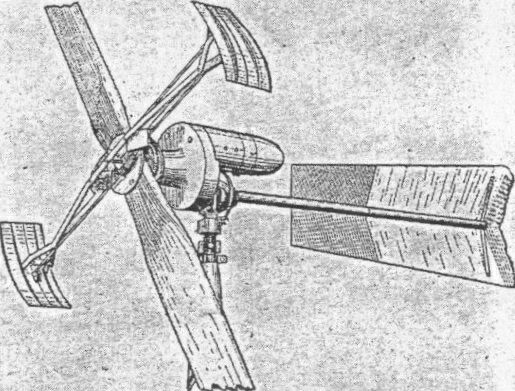
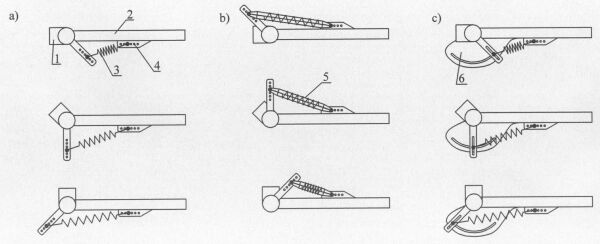
Rys. 2. Regulacja systemem Windcharger
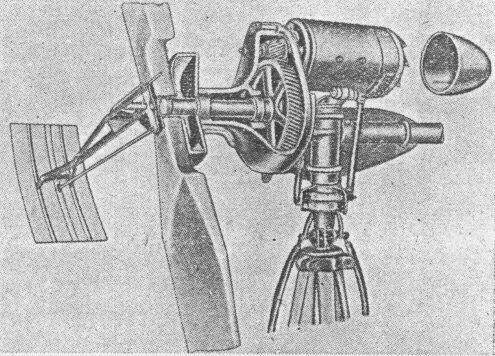
Rys. 3. Wiatrak Windcharger w przekroju
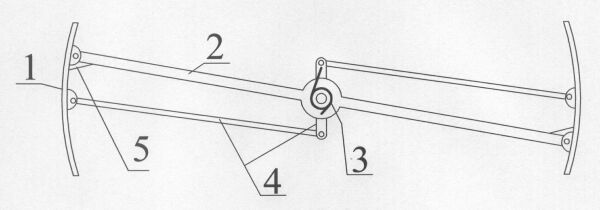
Rys. 4. Schemat mechanizmu zapewniającego
równoczesne
odchylanie klap hamujących
1) klapa hamująca, 2) ramię, 3) sprężyna, 4) dźwignia i drążek, 5)
zderzak
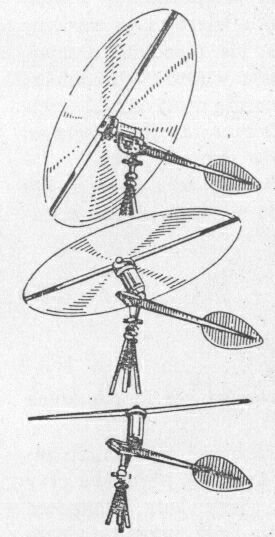
Podobna jest regulacja Perli dokonywana przez klapy umieszczone na końcach śmigła (rys. 5a); klapy te odchylają się pod wpływem siły odśrodkowej po przekroczeniu określonej szybkości obrotowej śmigła prostopadle do jego szybkości obwodowej.
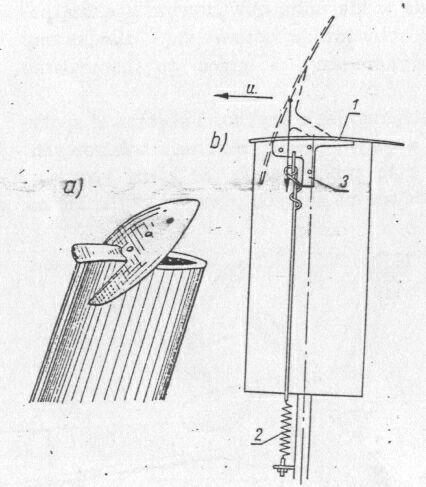
Rys. 5. Regulacja systemem Perli:
1 - klapa regulacyjna, 2 - sprężyna naciągowa, 3 - ciężarek wyrównawczy
klapy
W celu zmniejszenia w stanie
spoczynku klap ich oporów aerodynamicznych są one odpowiednio wygięte
wg promienia, po którym krążą. Po osiągnięciu przez śmigło określonej
szybkości obrotowej siła odśrodkowa, działająca na klapę l, rozciąga
sprężynę 2, w wyniku czego klapa się odchyla (rys.
5b linią przerywaną) i hamuje ruch śmigła. W celu zrównoważenia wpływu
zmniejszania się w miarę odchylania klapy ramienia
momentu siły odśrodkowej klapa jest zaopatrzona w odpowiedniego
kształtu ciężarek.
Urządzenie to nie jest zbyt skomplikowane, a utrzymuje
stałą szybkość obrotową w granicach do 5-12%. Ponieważ klapy
regulacyjne
zmniejszają opory indukcyjne śmigła, zwiększają przez to sprawność
silnika przy mniejszych szybkościach wiatru.
Ten system regulacji stosuje się w silnikach o średnicach do 7 m i o
wyróżnikach szybkobieżności ponad 4,5. Urządzenie to zabezpiecza w
znacznej mierze silnik wiatrowy przed osiowymi przeciążeniami od parcia
wiatru oraz przed rozbieganiem się do
szybkości wiatru 15 m/sek. Poza tym system ten nie dopuszcza do
przeciążeń silnika wiatrowego przy napędzie przez niego prądnicy prądu
stałego albo też pompy odśrodkowej; wymaga jednak
dodatkowego zabezpieczenia przed huraganami przez odwracanie w tych
przypadkach jego płaszczyzny obrotów w położenie równoległe do wiatru
(np. sterem bocznym).
Ważne jest aby klapy hamujące działały równocześnie - czyli przy zadziałaniu podobnej siły odśrodkowej. Dlatego najlepiej jeśli są połączone wspólnie jakimś mechanizmem (np. rys. 2, 3, 4) zapewniającym taki sposób działania, jeśli nie to muszą być dobrze wyregulowane (rys. 1, 5b i 6). Niejednoczesne działanie mechanizmów regulacyjnych (z powodu braku ich kinematycznego powiązania ze sobą) powoduje zachwianie równowagi dynamicznej śmigła oraz nierównomierny rozkład sił aerodynamicznych, co może spowodować drgania śmigła mogące doprowadzić do jego złamania.
W silnikach o średnicy śmigła większych od 7 m klapy regulacyjne wypadają zbyt duże, aby mogły być płaskie i w związku z tym okazało się konieczne umieszczanie ich w odpowiednio wykonanych wycięciach płatów śmigła podobnie do lotek w płatach samolotowych (rys. 6).
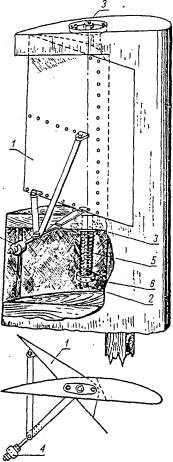
Rys. 6. Regulacja systemu Każyńskiego-Szamanina:
l - klapa regulacyjna, 2 - oś klapy. 3 - łożyska do osadzenia klapy, 4
-
ciężar regulacyjny, 5 - sprężyna naciągowa, 6 - nakrętka
regulacyjna
Klapa l obraca się wraz ze swą osią 2 w łożyskach 3 umieszczonych w
żebrach płata. Ciężar regulacyjny 4 został umieszczony na ramieniu
prostopadłym do powierzchni
klapy. Wewnątrz płata znajduje się sprężyna 5, której jeden koniec
zaczepia o ramię ciężaru, a drugi jest przymocowany do regulacyjnej
nakrętki 6. Dlaczego
ciężar 4 powoduje wychylenie lotki - tego można się dowiedzieć w części
omawiającej regulację przez skręcanie
łopat.
Do ochrony silnika przed huraganem konieczny jest ster boczny,
powodujący odwracanie w tych warunkach płaszczyzny obrotu śmigła od
wiatru.
To urządzenie regulacyjne jest dostatecznie proste w wykonaniu, a w
pracy okazało się
dość pewne.
Regulacja szybkości obrotowej silnika wiatrowego przy pomocy obciążenia użytecznego polega na tym, że w miarę wzrastania szybkości wiatru i zwiększania się szybkości obrotowej silnika powiększa się samoczynnie w odpowiedniej mierze jego obciążenie, powodując przyhamowanie śmigła.
Najprostszym systemem tego rodzaju regulacji szybkości obrotowej, bo odbywającym się bez jakichkolwiek urządzeń regulacyjnych, jest praca zespołu wiatrowo-elektrycznego na odpowiednio dużą baterię akumulatorów elektrycznych.
Na skutek zwiększania się podczas silniejszego wiatru szybkości obrotowej prądnicy wzrasta napięcie ładowania akumulatorów; następuje przez to znaczny wzrost prądu ładowania, a w wyniku i momentu obciążeniowego, powodującego przyhamowanie zespołu wiatrowo-elektrycznego. Po zaniku silniejszego wiatru na skutek zmniejszenia się szybkości obrotowej zespołu napięcie prądnicy maleje, a przez to maleje prąd ładowania oraz moment obciążeniowy zespołu, na skutek czego zespół zwiększa swą szybkość obrotową.
Ze względu na występujące przy
takiej regulacji znaczne wahania napięcia na odbiornikach energii,
które są w
tych przypadkach przyłączane bezpośrednio do zacisków baterii
akumulatorów,
ten system regulacji stosuje się tylko w zespołach mniejszej mocy.
Znaczne
wahania niższego napięcia baterii akumulatorów (np. 6 V) nie jest
bowiem tak
przykre dla odbiorników, jak znaczne wahania napięcia wyższego (np. 110
V).
Ważne jest w tej regulacji, aby w przypadku gdy odłączymy akumulatory
od
wiatraka, podłączyć go do jakiegoś odbiornika energii, oporników itp.,
tak
by wiatrak nie uległ rozbieganiu lub go zatrzymać zaciągając hamulec.
Regulacja ta nie zabezpiecza przed bardzo silnymi wiatrami.
REGULACJA PRZEZ PRZEKRĘCANIE ŁOPAT ŚMIGŁA WZGLĘDEM ICH OSI
Ten sposób regulacji silników
wiatrowych z uwagi na jego zalety jest obecnie stosowany coraz
częściej,
głównie w odmianie gdzie łopaty są nastawiane przez silnik sterowany
układem
elektronicznym. Jednak istnieją też wersje działające samoczynnie.
Działa
on dobrze i pewnie nawet podczas najsilniejszych wiatrów i mogą być
stosowane w silnikach wiatrowych małołopatowych (śmigłowych) wszystkich
mocy.
Regulacja ta polega na odpowiednim przekręcaniu płatów śmigła względem
ich osi, na skutek czego uzyskuje się zmianę kąta natarcia profilu
śmigła. Zmiana ta może polegać na zwiększaniu w miarę wzrostu szybkości
wiatru tego kąta natarcia albo też, co jest stosowane znacznie
częściej, na jego zmniejszaniu. W wyniku zmiany kąta natarcia podlega
pożądanej zmianie siła nośna profilu, a zatem i jej składowa obwodowa
Fobw, istotna dla pracy silnika.
Nasuwa się tu natychmiast
pytanie, czy nie można by wykorzystać do wymienionych celów śmigła o
takim profilu, aby przy stałym jego zamocowaniu uzyskiwać, pomimo
zmienności
szybkości wiatru, prawie stałą szybkość obrotową silnika wiatrowego.
Znane są bowiem profile o charakterystyce
raptownie opadającej po przekroczeniu pewnego kąta natarcia, przy czym
ten kąt natarcia w silnikach wiatrowych odnosi się do szybkości
względnej przepływu
(w - na rys. 1).
Rys. 1. Siły występujące na łopatce, wektory
prędkości wiatru (v) i łopatki (u), prędkość wypadkowa wiatru (w).
Na rys. 2 przedstawiono zmiany kąta natarcia profilu a w miarę powiększania się szybkości wiatru, napływającego do jego czoła, przy zachowaniu stałym jego kierunku oraz szybkości obrotowej śmigła.
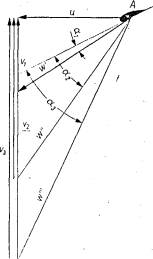
Rys.
2. Zmiany kąta natarcia
a przy zwiększeniu się szybkości wiatru
(prędkość
łopaty u=const)
Kąty te zwiększają się, jak to
widać na rysunku, w miarę zwiększania się szybkości wiatru.
Metoda ta istotnie prowadzi do celu, ale wobec bardzo szybkiego wzrostu
mocy wiatru wraz z jego szybkością jest ona niewystarczająca do
opanowania większych, a jednak w rzeczywistości występujących szybkości
wiatru. Dlatego to w celu uzyskania całkowitej regulacji szybkości
obrotowej śmigła przy wszystkich szybkościach wiatru konieczne jest
dokonywanie zmian kąta natarcia profilu przez przekręcanie łopat śmigła
względem ich osi.
Zaznaczyć tu należy, że ze względów konstrukcyjnych jest znacznie
korzystniej uzyskiwać regulację silnika wiatrowego przez zmniejszenie
kąta natarcia profilu w miarę wzrastania
szybkości wiatru, niż przez jego zwiększanie. W
pierwszym przypadku bowiem śmigło zwraca się podczas silnego wiatru
swą grubością do wiatru, w drugim natomiast swą szerokością, co
powoduje konieczność ujęcia przez konstrukcję silnika znacznie
większego osiowego parcia wiatru.
Do przekręcania
łopat śmigła
stosuje się różne urządzenia.
Na początek rozpatrzymy te oparte w swym działaniu na wykorzystaniu
siły odśrodkowej odpowiednio rozmieszczonych ciężarów, lub samych
śmigieł.
Zmian sił dynamicznych działających na płat śmigła.
Ponieważ wszelkie przekręcanie łopat śmigła względem ich osi powoduje podczas obrotu śmigła wokół osi obrotów zmiany sił odśrodkowych, działających na łopaty śmigła, należy przede wszystkim rozpatrzyć szczegółowiej zjawisko zmian tych sił dynamicznych, gdyż występują one w każdym tego rodzaju systemie regulacji.
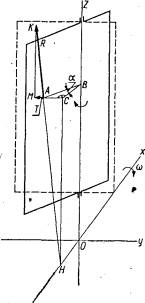
Rys. 3. Siły dynamiczne, występujące na obracającym się płacie
Wyróżnijmy zatem punkt materialny A (rys. 3), należący do płaskiego (dla uproszczenia rozważań) płata śmigła, mogącego się przekręcać wokół osi z, a obracającego się z szybkością kątową w względem osi x. Rzutem odległości punktu A od osi z na płaszczyznę przeprowadzoną przez oś z i oś x jest odcinek BC. Ponieważ promieniem szybkości obwodowej punktu A jest AH, siła odśrodkowa tego punktu materialnego wyniesie
R=m×w2×AH [1]
Siła ta jest przedstawiona na
rys.
3 jako wektor R, a jej składowa obwodowa jako wektor T.
Moment usiłujący obrócić punkt A względem osi z, wynosi
MA=T×BC [2]
Z podobieństwa trójkątów AMK i CAH wynika, że
T/R=AC/AH
skąd:
T=R×(AC/AH)=m×w2×AC
lecz
AC=AB×sina
BC=AB×cosa
Po podstawieniu tych wielkości w wyrażenie [2] otrzymamy
MA=m×w2×AC×BC=m×w2×AB2×sina×cosa [3]
Ale iloczyn masy punktu materialnego przez drugą potęgę jego odległości od osi z (m×w2×AB2) jest masowym momentem bezwładności tego punktu względem osi z, a suma takich iloczynów, obejmująca wszystkie punkty materialne całego śmigła, jest masowym momentem bezwładności całego śmigła względem osi z i oznacza się zwykle przez I, zatem
I=S m×AB2 [4]
Moment, usiłujący obrócić cały płat śmigła względem jego osi, wynosi
M=w2×I× sina× cosa=w2×I×(sin2a/2) [5]
Moment ten powoduje obrót płata
śmigła w takie położenia, w których staje się zerem, czyli gdy
a=0°, lub a=90°.
W jednym z tych położeń płat śmigła ustawia się równolegle do osi
x, w drugim zaś prostopadle do tej osi (linia przerywana na rys.
3 i 4), czyli leży w płaszczyźnie obrotu śmigła. W położeniu tym śmigło
znajduje się w równowadze stałej w przeciwieństwie do położenia
pierwszego - niestatecznego.
Moment skręcający śmigło jest największy w położeniu średnim między obu
wyżej wymienionymi, czyli przy kącie
a=45°, gdyż wtedy sin2a=1. Moment ten wynosi wtedy
M=1/2×w2I [6]
Podsumowując można
stwierdzić,
że na łopatkę w obracającym się wirniku działają siły próbujące ją
obrócić równolegle do płaszczyzny obrotu.
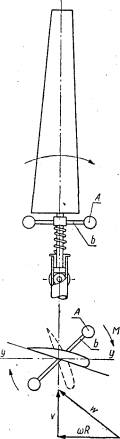
Regulacja obrotów śmigła przez zwiększanie kąta natarcia jego łopat.
Rys. 4. Zasada działania regulacji systemu Fatiejewa-Peczkowskiego
Do regulacji obrotów silnika wiatrowego przez przekręcanie łopat śmigła względem ich osi w kierunku zwiększania kąta natarcia mogą być wykorzystane opisane wyżej siły dynamiczne, występujące na łopatach śmigła. Dla uzyskania poprawnej regulacji śmigła kąt natarcia jego łopat podczas zwykłej pracy śmigła powinien odpowiadać najwyższemu punktowi krzywej biegunowej profilu, aby już po niewielkim powiększeniu tego kąta uzyskać znaczny spadek wielkości siły nośnej profilu.
W systemie tego rodzaju regulacji (Fatiejewa - Peczkowskiego, rys. 4) do odpowiedniego przekręcania łopat śmigła w miarę wzrastania szybkości wiatru została wykorzystana naturalna dążność płata śmigła do zajęcia w miarę zwiększania jego szybkości obrotowej położenia bardziej równoległego do płaszczyzny obrotu śmigła. Przeciwdziała temu naciąg odpowiedniej sprężyny nasuniętej na ramię łopaty śmigła i zaczepionej u jego piasty; w wyniku tego podczas pracy śmigła w czasie umiarkowanego wiatru jego łopaty ustawiają się pod pewnym kątem.
W miarę zwiększania się jednak szybkości wiatru, a zatem szybkości kątowej śmigła, następuje przekręcenie się pod wpływem wzrastających sił dynamicznych łopat śmigła w położenie bardziej równoległe do płaszczyzny obrotów. Powoduje to zwiększanie kąta natarcia profilu śmigła, a zatem zmniejszenie jego siły nośnej i jej składowej obwodowej. Najmniejszą siłę obwodową w wyniku działania sił dynamicznych uzyskuje się w położeniu łopat śmigła przedstawionym na rys. 4a linią przerywaną, co jednak dla regulacji śmigła podczas silniejszych wiatrów jest jeszcze niewystarczające. W celu zmniejszenia szybkości obrotowej śmigła i podczas tych silniejszych wiatrów do dalszego przekręcania jego łopat należy użyć siły dynamicznej dodatkowego ciężaru A umieszczonego na ramieniu łopaty śmigła na pręcie b. Ciężar ten, będąc umieszczonym prawie prostopadle do płata śmigła zmienia jego moment bezwładności w ten sposób, że łopata śmigła może się przekręcać również za położenie równoległe do płaszczyzny obrotu śmigła, zwiększając w dalszym ciągu swój kąt natarcia, a tym samym zmniejszając szybkość obrotową śmigła (rys. 4b).
Ten system regulacji odznacza się dużą prostotą urządzenia, gdyż przekręcania łopat śmigła dla celów regulacyjnych jest bardzo małe. Główna wada tego systemu regulacji polega na zwracaniu się łopat śmigła podczas silnych wiatrów ich szerokością do wiatru (przy mniejszych silnikach wiatrowych nie odgrywa to dużej roli). Natomiast ten system regulacji (przez przekręcanie łopat śmigła w kierunku zwiększania ich kątów natarcia) wykazuje taką zaletę, że umożliwia łatwe zwiększanie momentu rozruchowego śmigła przez samoczynne zmniejszenie kąta natarcia łopat śmigła w stanie spoczynku. Przekręcanie bowiem łopat śmigła od najmniejszego kąta natarcia przy rozruchu silnika do kąta największego podczas huraganu odbywa się w jednym kierunku i może być bardzo prosto przeprowadzone nie tylko przez siły dynamiczne płatów śmigła.
Ten system regulacji
został zastosowany w
zespole wiatrowo-elektrycznym
WIM D-3,5
o mocy l kW.
Regulacja przez zmniejszanie kąta natarcia łopat śmigła.
Jednym z systemów regulacji szybkości obrotowej śmigła przez zmniejszanie kąta natarcia jego łopat w miarę zwiększania się szybkości wiatru jest system W. Szamanina, przedstawiony schematycznie na rys. 5.
Rys. 5. Zasada działania regulacji systemem Szamanina
Do przekręcania płatów śmigła w
pożądanym
kierunku zostały w tym systemie wykorzystane siły dynamiczne łopat
zaopatrzonych w odpowiednie ciężary, umieszczone u nasad płatów na
prawie prostopadłych do nich ramionach. Ciężary A, umieszczone na
końcach ramion b podczas obrotu śmigła usiłują pod wpływem sił
dynamicznych tak przekręcić płaty śmigła, aby ciężary zajęły położenie
bardziej zbliżone do płaszczyzny obrotów śmigła, czyli do osi y (rys.
5). Siłom tym przeciwdziała napięcie sprężyny nasuniętej na ramię
łopaty śmigła.
Dla uzyskania dostatecznej regulacji szybkości obrotowej śmigła
wystarczają ciężary, których moment bezwładności przewyższa o ok. 30 %
moment bezwładności płatów śmigła.
System Szamanina jest więc w miarę prosty, działa skutecznie i
samoczynnie.
W systemach wyżej opisanych ważne jest aby łopaty przekręcały się równocześnie - czyli przy zadziałaniu podobnej siły. Dlatego najlepiej jeśli są połączone wspólnie jakimś mechanizmem (np. tak ja to rozwiązano w wiatraku WIM D-3,5, na rys. 6) zapewniającym taki sposób działania. Niejednoczesne działanie mechanizmów regulacyjnych (z powodu braku ich kinematycznego powiązania ze sobą) powoduje zachwianie równowagi dynamicznej śmigła oraz nierównomierny rozkład sił aerodynamicznych, co może spowodować złamanie łopat lub nieprawidłową regulację.
Odmianą regulacji polegającej na zmniejszaniu kąta natarcia jest system wykorzystujący siłę parcia wiatru do obrotu płatów śmigła względem ich osi. Osie obrotu łopat są położone blisko czołowych części profilu, wobec czego osiowe parcie wiatru na płaty usiłuje je przekręcić w położenie równoległe do kierunku wiatru. Przeciwdziałają temu siły dynamiczne łopat (starające się je ustawić w płaszczyźnie obrotu) oraz naciągu sprężyny (często za pośrednictwem dźwigni i cięgien). W wyniku współdziałania tych sił płaty śmigłowe powinny ustawiać się tak względem wiatru, aby obroty i moment obrotowy wirnika nie przekroczyły określonych wartości. W praktyce, mimo że wydaje się to proste do zrealizowania, regulacja ta okazała się jedną z najbardziej kapryśnych spośród wszystkich innych i nie znalazła szerszego zastosowania.
Powstało jeszcze kilka odmian
regulacji polegającej na zmniejszaniu kąta natarcia (bardziej
skomplikowanych)
- z dodatkowymi stabilizatorami, regulatorami odśrodkowymi itp.
Jednak jednym z najbardziej popularnych, szczególnie w większych
konstrukcjach
jest system polegający na przekręcaniu łopat za pomocą silników,
siłowników
itp. sterowanych komputerowo (rys. 6). Jednym z prostszych układów
elektronicznych mogących
posłużyć do sterowania pracą takiego silnika w mniejszych wiatrakach
jest układ
opisany w dziale Regulacja
elektroniczna.
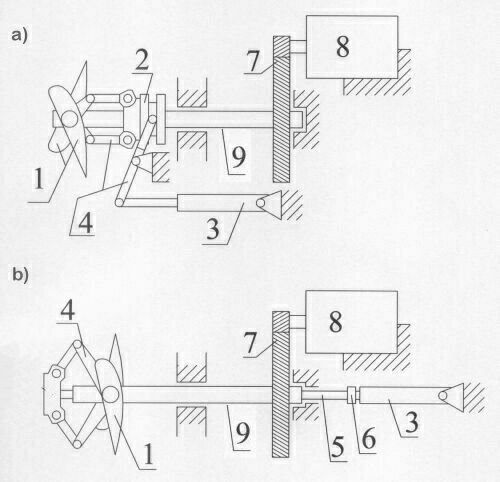
Rys. 6. Sterowanie kątem natarcia łopat za
pomocą siłownika przez: a) tarczę sterującą, b) popychacz;
1) łopaty, 2) tarcza sterująca osadzona na wale (z możliwością
przesuwania), 3) siłownik, 4) dźwignie, cięgna, 5) popychacz
przechodzący
przez środek wału, 6) specjalne łożysko - łącznik, 7) przekładnia
zębata,
8) prądnica, 9) wał wiatraka.
|
|
||
| |
|